
从有图到无图,从“小甜甜”变成了“牛夫人”,高精地图不香了吗?
小鹏、华为、蔚来、理想,地平线、毫末智行等等国内驾驶辅助的“第一梯队”相继宣布,未来将会采用以车辆自身传感器为主,高精地图为辅的策略继续发展自动驾驶(辅助)技术。
这说的很婉约了,其实就是要抛弃高精地图了。
犹记得,基于高精地图的高速/城市导航辅助驾驶功能还没有推出多久,怎么这就已经落伍了吗?
高精度地图相比于传统地图,顾名思义,精度更高,一般地图对于道路信息的精度在米级别,而高精度地图的精度在厘米级别,一般绝对精度低于1米,相对精度在10~20厘米。
毕竟,只有高精度的地图才能有效配合高精度的GPS定位,精确掌握车辆所处的地图位置。
自动驾驶时,车道与车道之间的距离,车道与街沿石之间的距离不过几十厘米,唯有高精度地图能够保证车辆行驶在正确的轨迹上。
另外,高精度地图的“高精度”还体现在信息量上,它的信息更加全面。
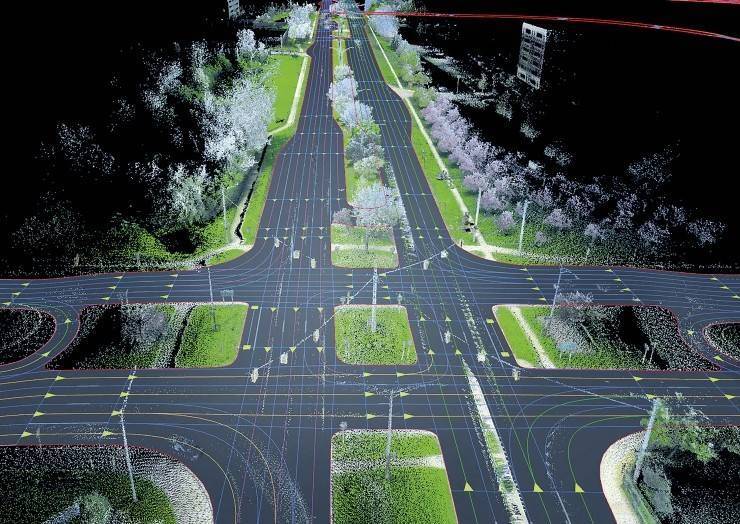
高精度地图划分了许多不同的图层,不同图层绘制了不同且大量的信息。
以四维图新的高精度地图为例,地图图层中,除了正常的道路形状、方向、曲率等,还有道路的坡度、侧倾、高度;车道线的类型比如实线、虚线,白色、黄色;隔离栏、绿化带等道路边沿信息。

定位图层中,包含红绿灯、交通指示牌、人行横道等交通设施信息,以及更加精细的路边地标数据。由此,可以协助车辆的传感器更好地定位自身。
最后一个动态图层,则包含了高频变化的道路信息。比如,交通事故、交通管制、道路拥堵状况、施工情况、天气情况、道路标识线变化、指示牌变化等动态交通信息。

我先举个例子。
众所周知,拉力赛需要的一个车组有两个人组成,一个车手,一个领航员。
拉力赛的行驶路况多变,车速高,弯道多,高低起伏大。很多时候驾驶员的视线并不足以提供足够的信息,就需要一个提前知晓前方路线的领航员负责给车手做指挥。
拉力赛中,我们看到赛车手能够高速通过一个个盲弯。领航员的指令就是驾驶员操作的依据。

甚至在极端情况下,驾驶员几乎完全丢失了视野,有领航员在,也能够继续驾驶。
高精度地图的作用就像是领航员。
在我们现阶段车辆自身感知能力还不够强大,且存在局限时,依靠高精度地图的指挥,便可以实现一定程度的自动驾驶。
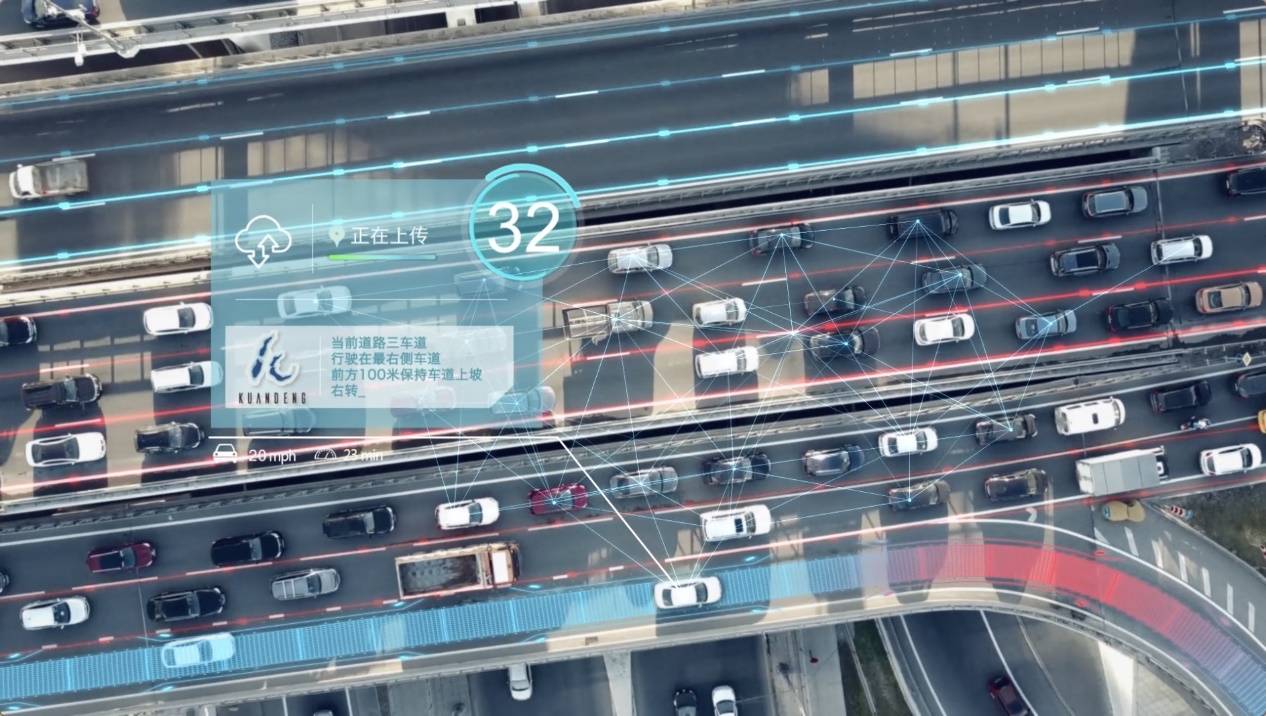
自动驾驶的三个核心流程包括感知、决策和执行。高精地图可以参与其中两个流程,感知和决策。
有了高精度地图,车辆可以提前预知前方的道路信息。
比如,上下匝道时明确实线起始位置,明确路况、排队车队的起点,可以及早做出变道规划,避免加塞与错过路口的风险。路口转弯时,也能够辅助规划行车路线。
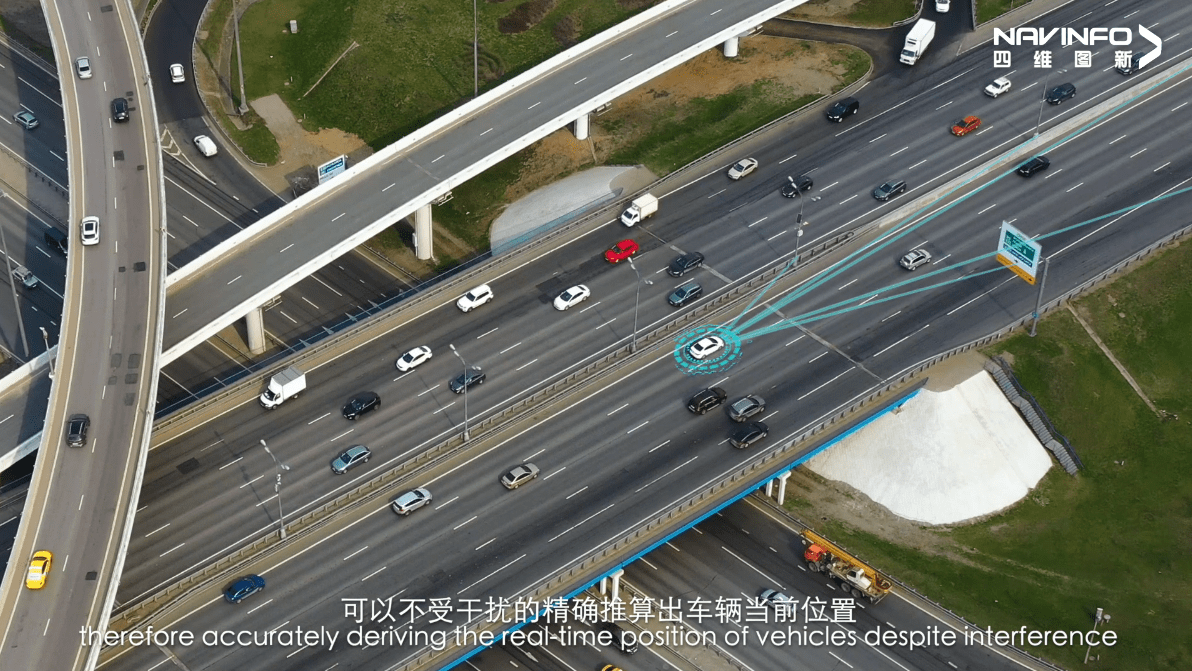
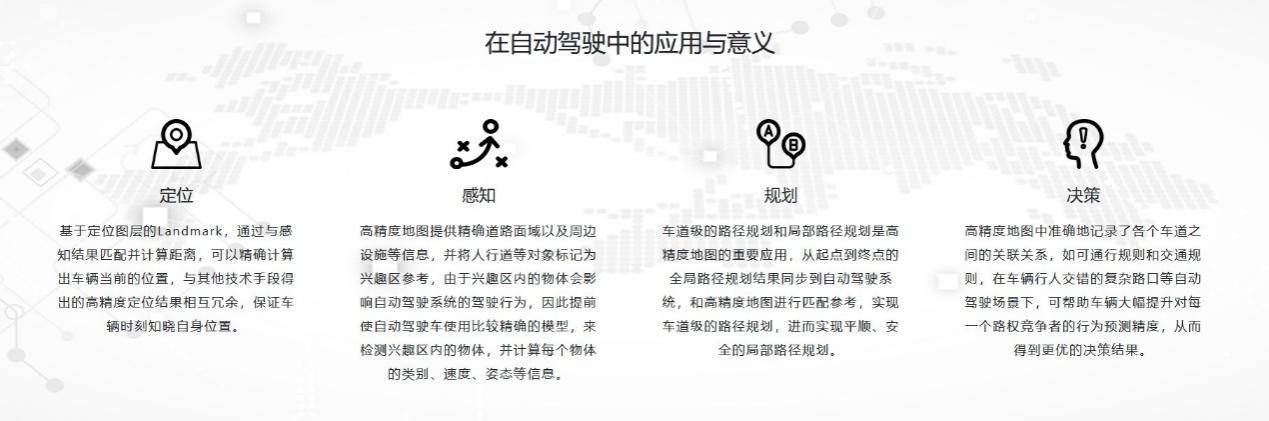
车道级的定位精度,以及各种地标信息,也可以辅助车辆准确定位自身位置。即使没有卫星定位信号,车辆通过地标信息与高精地图做比对也能够精确推算车辆的当前位置。
高精度地图包含道路交通规则和可通行区域的信息,从而让车辆辨识其他交通参与者的行驶意图,是否存在路权竞争,提高对于其他交通参与者行为的预测精度,从而做出更好的决策。

当然,高精度地图中详尽的道路信息,也可以减少驾驶控制算法的工作量。
就像是显卡的DLSS技术,可以将游戏画面进行优先级划分,将玩家关注的画面主体部分进行优先渲染,而不受关注的背景则减少资源分配,从而达到同等性能下更高的视觉画面质量与帧率。
高精地图可以将道路标志物信息,比如道路导流线、人行横道、红绿灯等信息提前输入给辅助驾驶决策模块,车辆自身感知系统就能够优先把感知能力分配给道路上动态的车辆、人员等兴趣点。
从而,变相提高了有限算力下的感知能力。

正因为有这些优点,高精地图曾被视为自动驾驶技术的必经之路。
现阶段已经实用的高速、城市导航辅助驾驶功能,比如小鹏的NGP、蔚来的高速NOA、华为NCA/ICA等等,都需要基于高精地图,才能充分发挥功能。
但基于高精地图的导航辅助驾驶局限性也很大,这种局限性甚至盖过了高精地图的优势。
高精地图覆盖区域是一个大问题,目前基于高精地图的导航辅助驾驶功能仅仅只能在高精地图覆盖的少数城市/道路使用。
一旦行驶进入⽆⾼精地图覆盖或者⾼精度地图信息与实际驾驶场景有差异的场景,辅助驾驶就会降级或退出,仅有L2可用。
即使能够做到自动恢复,这种降级也会严重影响使用体验的一致性与连贯性,是否会有功能降级导致路线错误的忧虑挥之不去。
而造成高精地图覆盖小的主要原因在于高精度地图信息收集效率低,难度大。
一方面,高精地图的测绘难度高,信息量大,根据《智能网联汽车高精地图白皮书》的说法,采用传统测绘车方式,分米级地图的测绘效率约为每天每车500公里路,成本为每公里10 元左右。
而如果上升到厘米级地图,测绘效率就只能是为每天每车100公里,但是,测绘成本就要达到每公里1000元。
另一方面,城市道路建设快,施工占道、临时封路等现象层出不穷,交通事故、拥堵程度也会随时变化。
高精度地图中重要的动态地图图层需要以分钟为单位进行更新。这意味着传统采集车模式并不能够满足动态图层的更新需求。
特斯拉FSD和Mobileye的REM都采用了众包地图的概念,即每一辆搭载该系统的车辆都是测绘车。将行驶过程中采集的数据上传到云端,形成新的动态图层,搭载该系统的车辆越多,地图越精确,更新越及时。
另外,地图自古以来都是兵家重器,因此国家对于测绘资质的管理相当严苛,拥有高精地图测绘资格的寥寥无几,后进者也无门而入。
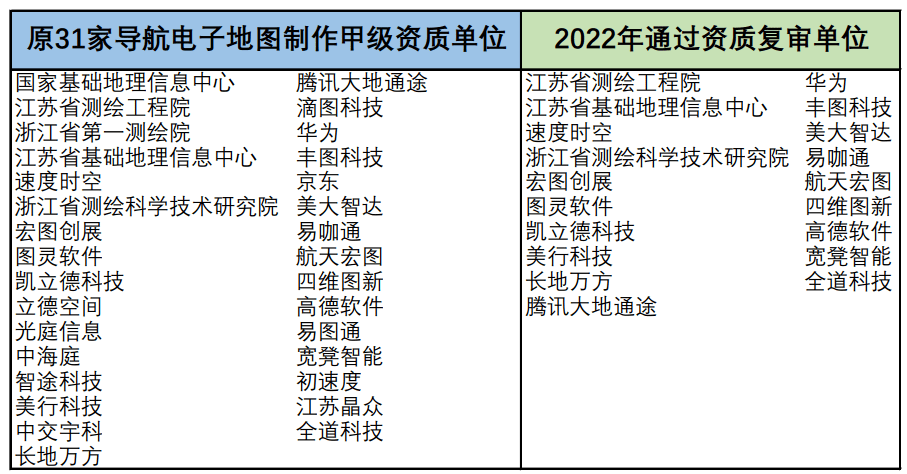
图源:盖世汽车
而车辆收集测绘而来的数据又是自动驾驶技术的核心,灵魂所在,车企自然不愿意交给别人,如此一来,高精地图就成为了需要避开的“雷区”。
除了高精地图的固有弊端之外,自动驾驶技术在传感器、识别算法、算力等领域的发展已经突飞猛进。
前两年的小鹏P5用的Xavier算力只有30TOPS,而现在广泛使用的,不论是华为、英伟达Orin X还是地平线,他们的自动驾驶芯片已经达到200TOPS以上,而新一代的产品比如英伟达DRIVE Thor甚至会达到2000TOPS,完全可以称为“力大砖飞”的程度。
好似RPG游戏中,人物角色已经满级了,跑图时已经不怕遇上小怪,那么高精地图给的全图透视挂也就作用不大了。

虽然都说要上“无图领航”,但要说高精地图就此“偃旗息鼓”,还为时尚早。甚至只是一个开始
汽车安全无小事,自动驾驶的“长尾效应”还没能解决,Corner Case层出不穷,车辆自我感知还远没有到一统天下的地步。
俗话说得好,不论Intel给了多少性能,Windows都能吃掉,对于算法也是同样的,为了应对层出不穷的突发情况,自动驾驶算法对于芯片性能的要求也望不到头。
车企开发的无图领航辅助能力,意味着光靠车辆自我感知就能解决绝大多数的问题。但“不怕事”不意味着“不怕麻烦”,总会有千奇百怪的场景等待给你一个“惊吓“。
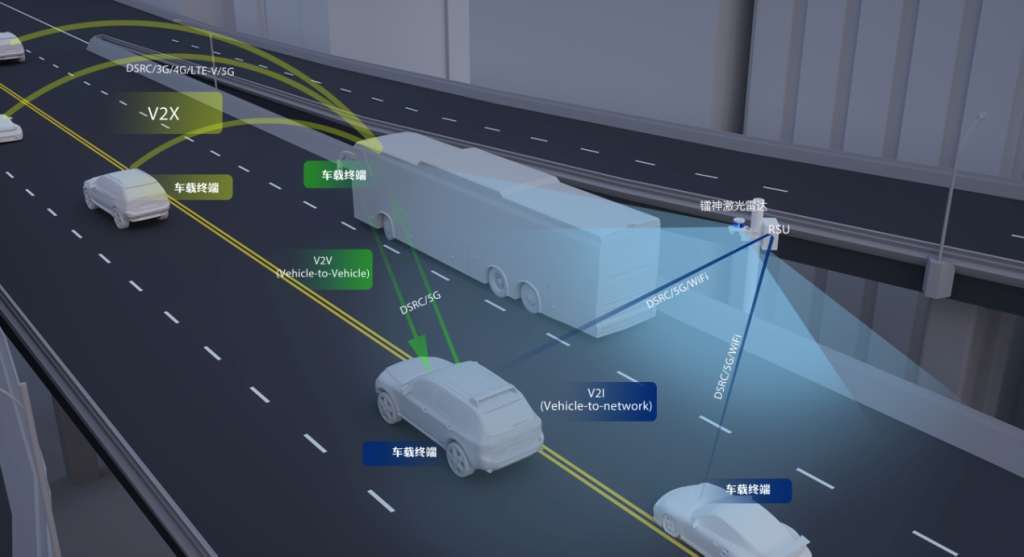
甚至面对一些极端场景,比如鬼探头,自我感知以及高精地图都无法很好的做预知,这时候,角落里默默无闻的车路协同就要出来刷存在感了。
不识庐山真面目,只缘身在此山中,换个视角,鬼探头就有解了。
跑图时不怕小怪,突然刷个野外精英boss也会让人头疼。
术业有专攻,让我们回想一下人类为什么要发展自动驾驶,自动驾驶的目标是什么?
- 减少开车所需的人力资源。可以分为无人驾驶的Robotaxi和解放驾驶员,满足驾驶员行驶途中的办公娱乐休息需求
- 减少交通事故,自动驾驶可以避免人类驾驶员可能存在的注意力分散和误判等问题
- 提高道路通行效率
车辆自我感知策略下,理想情况下也最多成为一个不会出事故的老司机,可以实现自动驾驶的前两个目标。
自我感知的弱点在于探测距离的局限,因此,它的路线规划能力是有限的基于个体的,不具备提高道路整体通行效率的能力。

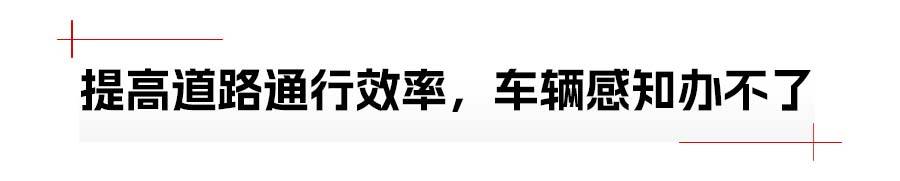
试想这样一个场景,匝道汇入主路。
理想的方式是什么,主路的车辆依次排列留出合适的间距,匝道车辆在辅道完成排列与提速和主路车辆速度一致,在恰到好处的时间到达恰到好处的位置,如拉链般依次嵌入。
整个过程不能因为可能存在对方行为的不确定性而做出减速/避让行为,从而最大化道路的通行能力。
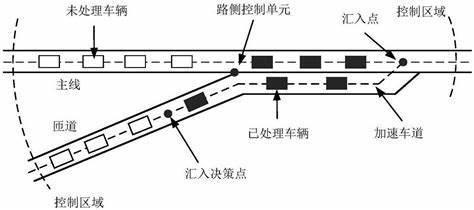
以此需求来倒推车辆功能:靠近匝道时,车辆感知和高精地图需要共同确认车辆位置,交由车路协同作为中央大脑,决策分配每一辆车辆的车速与到达路口的时刻,位置,最后由车辆感知来实现这一决策。
基于个体视角的自动驾驶是不可能完成这一任务的,需要的是车辆感知、高精地图、车路协同的通力合作。

无图不是真无图,只是我们正处于一个训练成为老司机的阶段,不能依赖图。
但一个虚拟的老司机还远不足以达成自动驾驶的终极目标,感知手段永不嫌多,各擅胜场,取长补短。