
最近两天,AEB因为两位大佬的互怼频上热搜,也引发了不少车企高层参与讨论。
有人表示,AEB有什么新奇;有人蹭起了热度,表示自家的AEB很优秀;还有人表示,不参与争论,因为实在吵不过啊。

那么处于舆论中心的AEB到底是什么?
为了方便大家吃瓜,本文将从AEB的工作原理、运行难点两个方面入手,为大家详细剖析。

AEB全称为Autonomous Emergency Braking,意为自动紧急刹车系统。简单来说,它是一种主动安全技术,能够在某些紧急情况下使车辆制动。
AEB在驾驶过程中有较高的实用性,比如能减少我们因注意力不集中导致的追尾等事故;再比如,在夜间行驶/倒车视野不清晰时,能辅助我们观察周围情况。
据欧洲Euro-NCAP机构的调研结果显示,车辆装备AEB之后能减少27%的事故。
目前AEB已十分普及,乘联会统计数据显示,2023年上市的16万以上新车中,配置AEB功能的占比为67%。

对于AEB,目前并没有统一的名称,比如大众称为Front Assist(前部辅助),沃尔沃称为City Safety(城市安全辅助系统),丰田则将其囊括在Toyota Safety Sense(智行安全)系统中。
虽然叫法不同,不过各家AEB的工作原理都基本一致,主要分为三部分:信息采集、数据分析与制动执行。
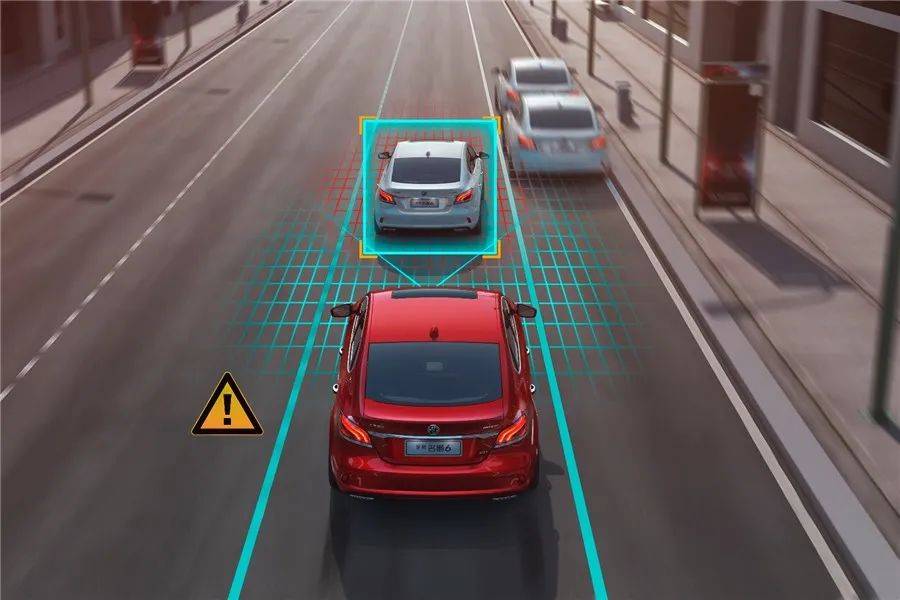
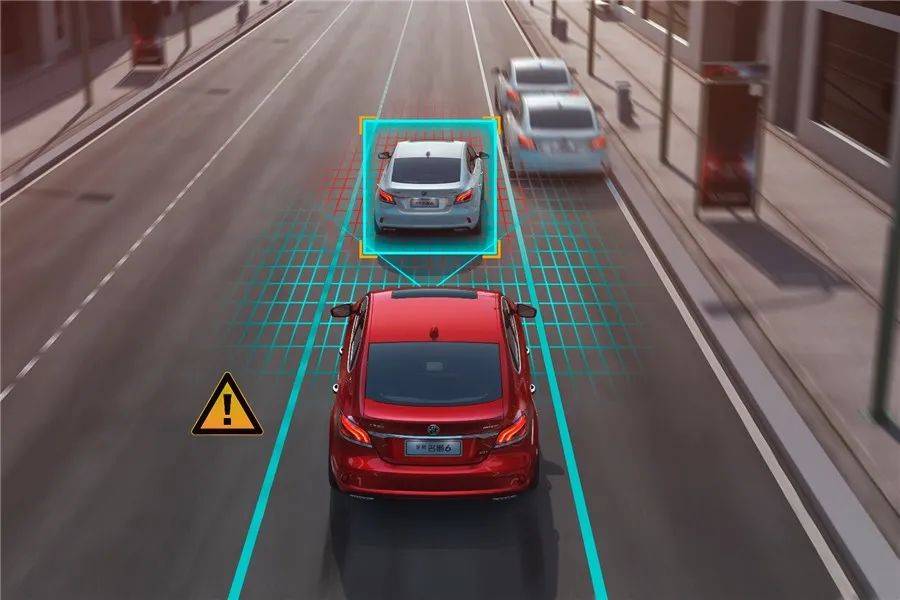
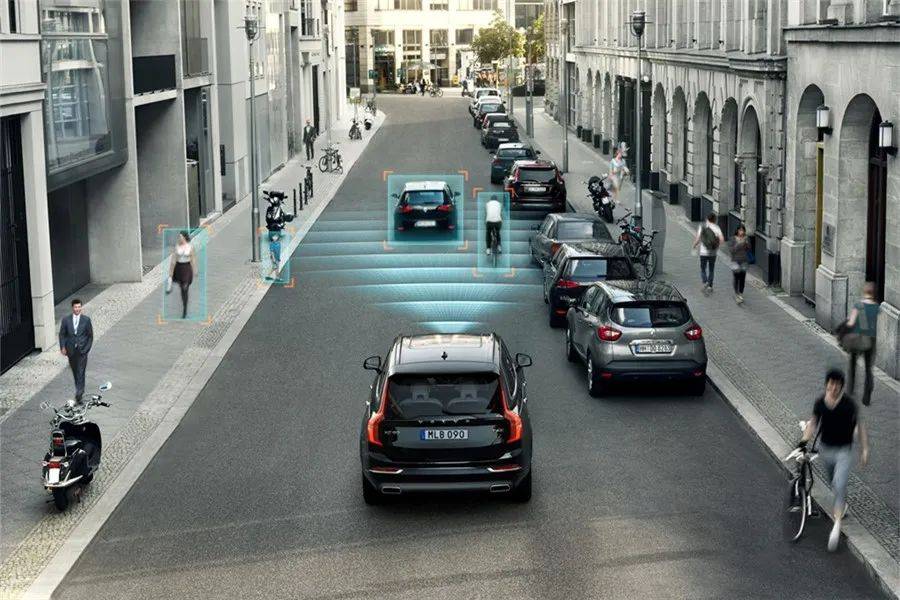
信息采集是基础,也是最为关键的模块之一,主要通过各类传感器,获得其他道路参与者的信息,比如与前方车辆、行人或者其他物体的距离等。

而各家采集信息的思路又有所不同,比如有只用摄像头的纯视觉方案,以特斯拉为代表。该方案的优势为成本低、体积小。
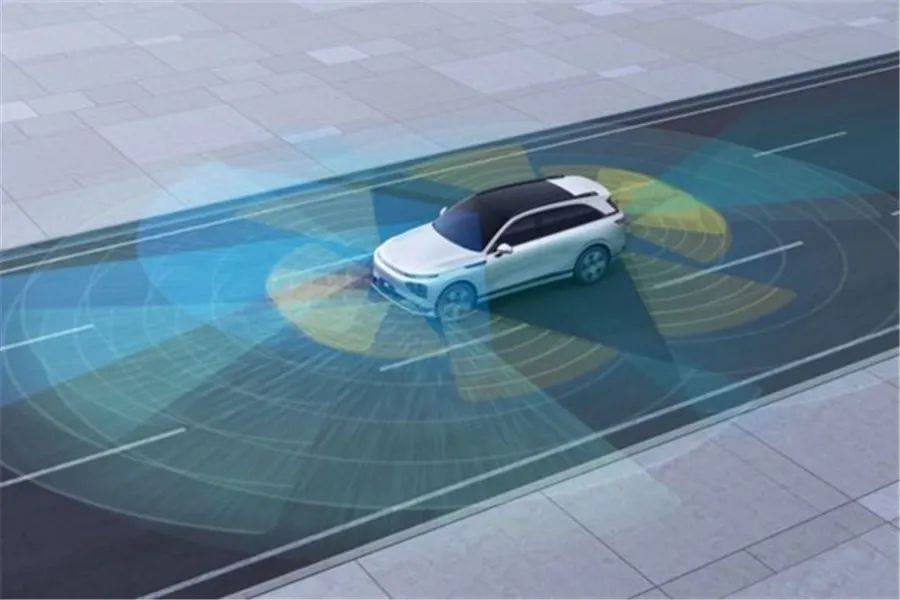
目前大部分车企采用的是多传感器融合感知方案,不单单使用摄像头,还加入了毫米波雷达、激光雷达、超声波等传感器,大多数供应商也是如此,比如博世、华为等。该方案的优势是能够消除单一传感器的误差,提高信息采集的精确度与全面性。
传感器采集到信息后,控制模块会对其进行处理,该模块类似于大脑,将根据预定的模型分析出当前车辆是否处于安全距离,并检测潜在的碰撞危险。
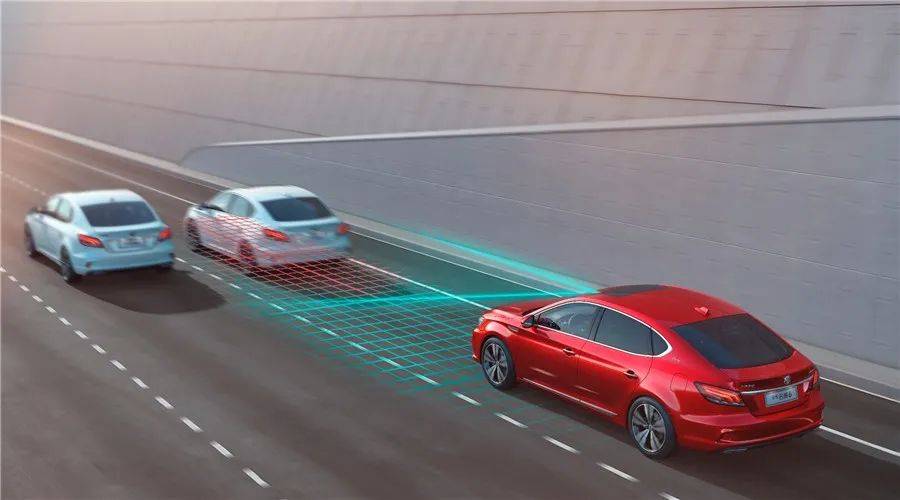
先来科普一个专业词汇,TTC(Time-To-Collision),中文直译为碰撞时间,它指的是基于当前车辆的行驶速度和前方物体的距离,计算出两者发生碰撞所需要的时间。
控制模块会比较安全距离与TTC是否低于系统设置的阈值,一般情况下会先进行安全预警,如果此时我们并未进行任何制动操作,那么安全距离与TTC超过极限值时,系统就会强制介入采取紧急制动,从而避免碰撞事故的发生。
值得注意的是,不同的车企算法不同,TTC的阈值也不同,所以AEB的制动效果有一定差异。

通过AEB系统的工作原理我们不难发现,几乎每一个部分都不容易实现。

首先是信息采集部分,一是传感器受外界环境影响大,比如在雨雪、雾霾等极端天气中,雷达、摄像头可能会完全失效。
哪吒汽车CEO张勇也表示,各种场景下AEB的功能表现会不一致,比如天气,雨量,阳光,速度等。
二是受限于算法,AEB系统难以识别静态物体。准确地说,雷达等传感器可以探测到静态障碍物,但是为了减少不必要的预警与刹停影响驾驶体验,该部分信号通常会被系统直接过滤。
所以AEB一般不能区分道路上静止的锥桶、侧面的交通标志或者刹停的汽车。比如此前一辆理想ONE就曾在某高速路段撞上了停在路边的工程车。
信息采集的不准确性就会导致AEB系统可能会出现误差与误判,一是该启动时不启动,二是不该启动时却启动,而后者也就是我们常说的AEB误触率,这也是车企们正努力减少的核心问题之一。
误触率主要与车企算法识别的阈值有关。如果算法识别的阈值太低,可能频繁触发“幽灵刹车”;如果阈值太高,可能会出现漏检的情况。

值得注意的是,直接实施AEB刹停可能会造成其他事故的发生,比如高速上刹停极易造成连续追尾等重大事故,所以现在车企们对于AEB都有速度限制,一般情况下,车速在60km/h以内才能触发,部分情况下只进行预警。
那么何为好的AEB系统呢?目前并没有统一的标准,E-NCAP(欧洲新车评估规程)和C-NCAP(中国新车评估规程)测试也只能作为参考。

以C-NCAP为例,其AEB测试场景包括前车静止/慢行、行人远端穿行/近端穿行/直行、自行车近端穿行/纵行直行、踏板式摩托车远端穿行。
有些车型刹停速度最高只有30km/h,有些表现优异的车型可达到80km/h,这也能在一定程度上反映出车企AEB系统的反应速度、算法等方面的优劣。
但是C-NCAP测试中道路参与者与场景只有寥寥几个,现实生活中却数不胜数,而AEB又不得不考虑到这些因素。所以,即使车辆在测试中得到了优异的结果,实际表现也可能不尽如人意。
张勇也表示,AEB场景的复杂性太高……要做得好确实难度很高,需要极大里程和样本量的测试。

相信未来随着技术创新与数据积累,AEB系统会不断进步,但是现阶段,我们还是需要时刻将方向盘握在自己手中~